Принцип и применение ультразвуковых датчиков в роботах-пылесосах
- доля
- Издатели
- Zoe
- Время выпуска
- 2024/8/17
Резюме
Ультразвуковая технология идентифицирует ковры в роботах-пылесосах аналогично тому, как ультразвуковая диагностика оценивает материалы напольных покрытий, и не зависит от света и цвета.

Робот-пылесос 4.0 теперь оснащен новым датчиком — ультразвуковым датчиком, который решает проблему распознавания полов и ковров.
Что такое ультразвуковой датчик?
Ультразвуковой датчик — это устройство, преобразующее ультразвуковые сигналы в другие энергетические сигналы (обычно электрические). Ультразвуковые волны — это механические волны с частотой колебаний выше 20 кГц и длиной волны, превышающей диапазон слышимости человеческого уха (20 Гц ~ 20 кГц). Они характеризуются высокой частотой, короткой длиной волны, минимальной дифракцией, особенно хорошей направленностью и способностью распространяться направленно, как лучи. В повседневной среде они практически невосприимчивы к помехам, за исключением когерентных волн, и не представляют никакого вреда для человека.
Его применение в медицине, автомобилестроении, беспилотных летательных аппаратах и других отраслях весьма обширно.
Ультразвуковые датчики также широко используются в автомобилях и беспилотниках.
Например, датчики парковки задним ходом.

Зачем роботам-пылесосам ультразвуковые датчики?
Фактически, ультразвуковые датчики помогают роботам-пылесосам «распознавать» ковры. Оснащенный ультразвуковым датчиком, робот-пылесос может определять тип напольного материала.
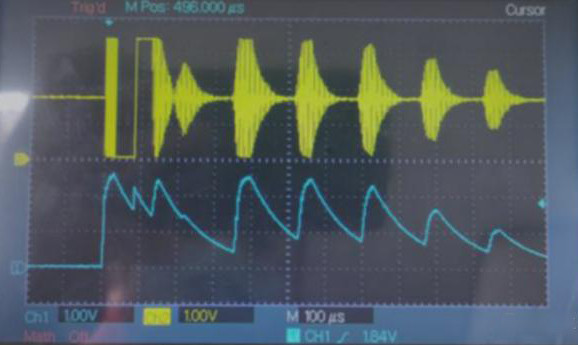
При столкновении с гладким полом, благодаря отражательному режиму, ультразвуковые волны минимально поглощаются полом, а датчик фиксирует непрерывное «отражение» волн.
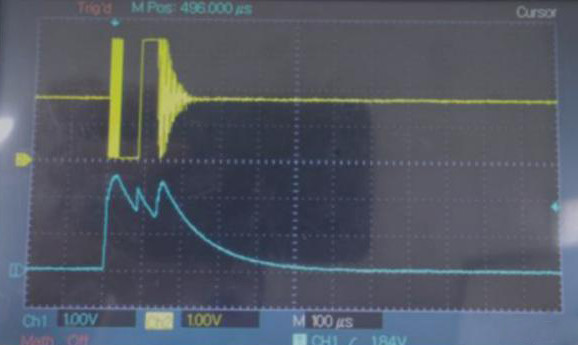
Однако, когда робот сталкивается с ковром с волокнами, в неотражающем режиме ультразвуковые волны поглощаются материалами с сильными звукопоглощающими свойствами, такими как войлок, шерсть, хлопок или губчатая пена. В этот момент робот-пылесос не получает эхо и распознает, что приближается к ковровому покрытию.
Почему стоит отдать предпочтение ультразвуковому обнаружению, а не самым передовым алгоритмам обнаружения объектов на базе искусственного интеллекта?
Если обнаружение объектов с помощью ИИ основано на «зрении», то ультразвуковые датчики работают скорее как «тактильные» датчики.
Фактическая эффективность обнаружения объектов с помощью ИИ зависит от многих факторов, таких как освещение, цвет ковра, угол обнаружения, скорость обработки в реальном времени и разрешение камеры.
Например, в условиях плохого освещения и ковров темного цвета ИИ, скорее всего, ошибочно идентифицирует ковер как пол. Однако, благодаря принципу работы ультразвуковых датчиков, они не подвержены влиянию этих факторов, что позволяет избежать подобных ошибочных суждений.
Рекомендуемые ультразвуковые датчики

Диапазон обнаружения: 20-120 мм Диапазон обнаружения: 20-200 мм Материал: медно-никелевое покрытие Тип подключения: 4-контактный разъем M12

Диапазон обнаружения: 100-2000 мм, 200-4000 мм, 350-6000 мм Материал: медно-никелевое покрытие, пластиковые фитинги Тип подключения: 5-контактный разъем M12

Диапазон обнаружения: 30-300 мм, 50-500 мм, 60-1000 мм Материал: медно-никелевое покрытие, пластиковые фитинги Тип подключения: 5-контактный разъем M12

Дальность обнаружения: 100-2000 мм, 150-3000 мм Материал: пластиковые аксессуары, залитые эпоксидной смолой Тип подключения: 5-контактный разъем M12