Изучение роли LiDAR в автономных мобильных роботах (AMR)
- доля
- Издатели
- Zoe
- Время выпуска
- 2024/9/4
Резюме
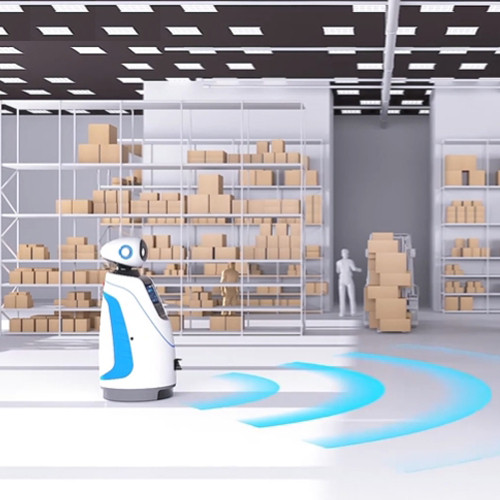
AMR повышает эффективность промышленной автоматизации и логистики благодаря автономной навигации и гибкости.
Что такое 2D TOF LiDAR и как он работает в AMR?
2D TOF-лидар
2D TOF LiDAR (Two-Dimensional Time of Flight LiDAR) — это лазерная радиолокационная система, работающая по принципу времени пролета (TOF), используемая для двумерных пространственных измерений. Она работает, испуская лазерный луч в направлении цели и измеряя время, необходимое для испускания лазера, отражения его от цели и возвращения (т. е. время пролета), чтобы точно рассчитать расстояние между целью и LiDAR. Отраженный сигнал после обработки предоставляет информацию о расстоянии до цели. Благодаря включению механизма сканирования LiDAR (например, вращающегося зеркала или линейного сканирования) система может дополнительно определять положение цели (т. е. азимут) в двумерной плоскости.
Автономные мобильные роботы (AMR)
При обсуждении AMR люди часто вспоминают другую родственную концепцию — AGV.
AGV, что означает «автоматически управляемое транспортное средство», — это тип транспортного средства, которое может автоматически двигаться по заданному пути, обычно используемому для транспортировки объектов. AGV следуют заданному пути, и если они сталкиваются с препятствием во время движения, они останавливаются и ждут, пока препятствие не будет устранено, прежде чем продолжить движение по заданному пути для выполнения транспортной задачи.
AMR, что означает «автономный мобильный робот», достигает движения без следов с помощью автономной навигации и часто может быть оснащен роботизированными руками для улучшения возможностей обработки объектов. AMR могут сравнивать свой текущий путь движения с предварительно сохраненной картой в режиме реального времени. Если во время движения появляется препятствие, система немедленно пересчитает лучший маршрут, чтобы обойти препятствие и достичь назначенного места.
Распространенные методы автономного движения для AMR включают навигацию LiDAR (LiDAR SLAM) и визуальную навигацию (Visual SLAM). В этой статье основное внимание будет уделено навигации LiDAR для AMR.
LD-05D 2D TOF LiDAR
LD-05D 2D TOF LiDAR от DADISICK имеет функцию самообучения, позволяющую пользователям устанавливать рабочую область с помощью программного обеспечения «LD Designer». При нажатии и удерживании кнопки «самообучения» в течение 3 секунд устройство переходит в режим самообучения. В этом режиме 2D LiDAR выполняет горизонтальное лазерное сканирование для быстрого захвата информации о 2D-контуре среды, окружающей робота, используя сканированный контур для определения границ рабочей области.
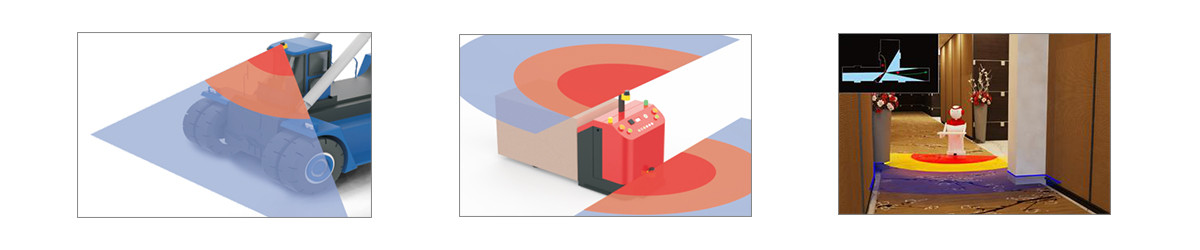
Ключевые функции 2D TOF LiDAR в системах AMR
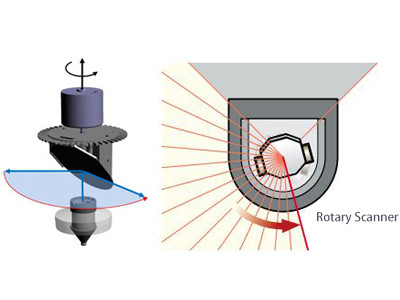
Радарное сканирование:
2D LiDAR сканирует горизонтальную плоскость, испуская лазерные лучи и принимая сигналы, отраженные от окружающих объектов. Эти сигналы используются для измерения расстояния и угла (обычно азимута) между объектами и радаром.
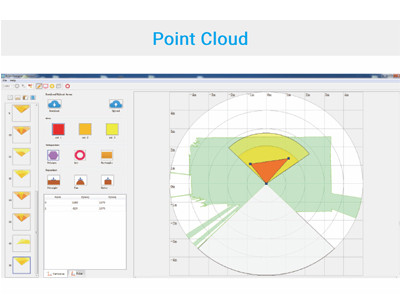
Генерация облака точек:
В процессе сканирования собранные радаром точки данных (расстояние и угол) преобразуются в облако точек в системе 2D-координат. Эти точки данных облака точек представляют положения и формы объектов в плоскости сканирования радара.
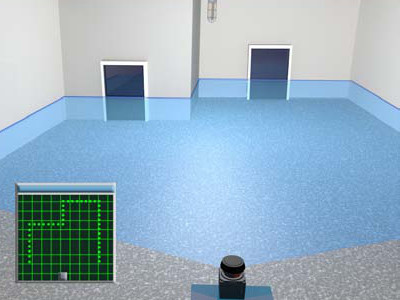
Построение карты:
На основе данных облака точек можно создать 2D-карту окружающей среды. Эта карта может быть в форме карты сетки занятости, где каждая ячейка сетки представляет собой небольшую область окружающей среды и помечается как свободная (проходимая), занятая (загроможденная) или неизвестная на основе данных радара.
Автономная навигация
Для AMR, оснащенных 2D LiDAR, обычно используются алгоритмы, подходящие для 2D-сред, такие как gmapping, hector, karto и cartographer. Эти алгоритмы используют данные, предоставленные 2D LiDAR, для построения карты и локализации робота.
В процессе SLAM AMR использует данные об окружающей среде, полученные 2D LiDAR, в сочетании с алгоритмами SLAM, для постепенного построения 2D-карты рабочей среды. Эта карта не только включает расположение препятствий, но также может включать стены, коридоры и другие характеристики окружающей среды.
С исходной картой и данными об окружающей среде в реальном времени AMR может достичь более точной локализации с помощью алгоритмов SLAM. На основе построенной карты AMR может выполнять планирование пути, выбирая оптимальный маршрут для обхода препятствий и достижения целевого местоположения.
При возникновении изменений окружающей среды (например, появления новых препятствий или блокирования путей) AMR будет использовать данные 2D LiDAR и алгоритмы SLAM для обновления карты и перепланирования маршрута. Благодаря этому динамическому механизму адаптации AMR поддерживает непрерывную и стабильную автономную навигацию.
Соображения:
Поскольку 2D LiDAR сканирует только в горизонтальной плоскости, он не может предоставить информацию о высоте препятствий, что может ограничить навигационные возможности AMR в некоторых ситуациях, особенно когда высота препятствия существенно влияет на проходимость робота. Однако во многих сценариях движения в 2D плоскости (например, в помещениях и на ровных открытых площадках) 2D LiDAR достаточно для картографирования и навигации.
Интеграция 2D TOF LiDAR с другими датчиками и будущие тенденции
LiDAR также может быть интегрирован с другими датчиками, такими как камеры и ультразвуковые датчики, для повышения общей производительности AMR. Например, в системе предотвращения столкновений AMR ультразвуковые датчики могут дополнять LiDAR, улучшая способность робота обнаруживать объекты с низкой отражательной способностью и адаптироваться к определенным условиям окружающей среды. Кроме того, в сценариях, требующих обнаружения на близком расстоянии, например, в зазорах между роботом и полками, ультразвуковые датчики могут играть решающую роль.
Расстояние 5 м. Метод, использующий лазерный луч для измерения расстояния и создания подробных карт объектов и окружающей среды.

Дальность обнаружения 20 м. Метод, использующий лазерный луч для измерения расстояния и создания подробных карт объектов и окружающей среды.

Диапазон обнаружения: 30-300 мм, 50-500 мм, 60-1000 мм Материал: медно-никелевое покрытие, пластиковые фитинги Тип подключения: 5-контактный разъем M12

Диапазон обнаружения: 100-2000 мм, 200-4000 мм, 350-6000 мм Материал: медно-никелевое покрытие, пластиковые фитинги Тип подключения: 5-контактный разъем M12