Знание отрасли | Небольшие подробности использования датчика LiDAR в особых сценариях
- доля
- Время выпуска
- 2024/5/29
Резюме
Датчики LiDAR включают типы предотвращения препятствий, навигации и интегрированной навигации. Они обладают такими преимуществами, как высокая точность, сильная защита от помех и высокая надежность.
Датчик LiDAR — это технология, впервые предложенная в 1960-х годах. Благодаря широкому применению за последние несколько лет LiDAR пережил новый виток процветания и прогресса, а также многоотраслевое использование. Она быстро стала ключевой технологией в области автономного вождения, инспекций дронами, промышленной автоматизации и т. д.
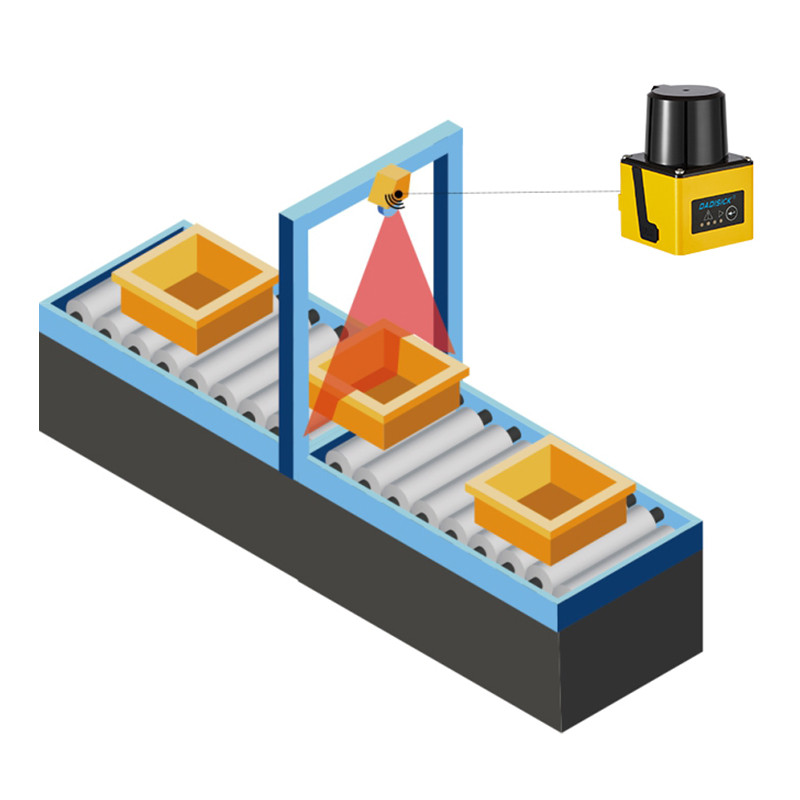
На сегодняшний день DADISICK выпустила несколько продуктов серии датчиков LiDAR , охватывающих тип предотвращения препятствий, тип навигации, а также интегрированную навигацию и тип предотвращения препятствий; они обладают такими преимуществами, как высокая точность измерений, высокая скорость сканирования, сильная защита от помех, небольшой размер, легкий вес и высокая надежность, и являются идеальным выбором для промышленных автоматических транспортных средств, мобильных роботов и низкоскоростных роботов.
Каждый датчик имеет свой собственный сценарий применения, основанный на его собственных характеристиках. В реальных приложениях для особых условий у LiDAR также есть несколько советов по использованию.
Принцип работы датчика LiDAR
Датчик LiDAR основан на принципе времени пролета (TOF); LiDAR излучает лазерный импульс и измеряет время, необходимое для возвращения импульса после отражения от поверхности измеряемой цели, которое затем преобразуется в данные о расстоянии.
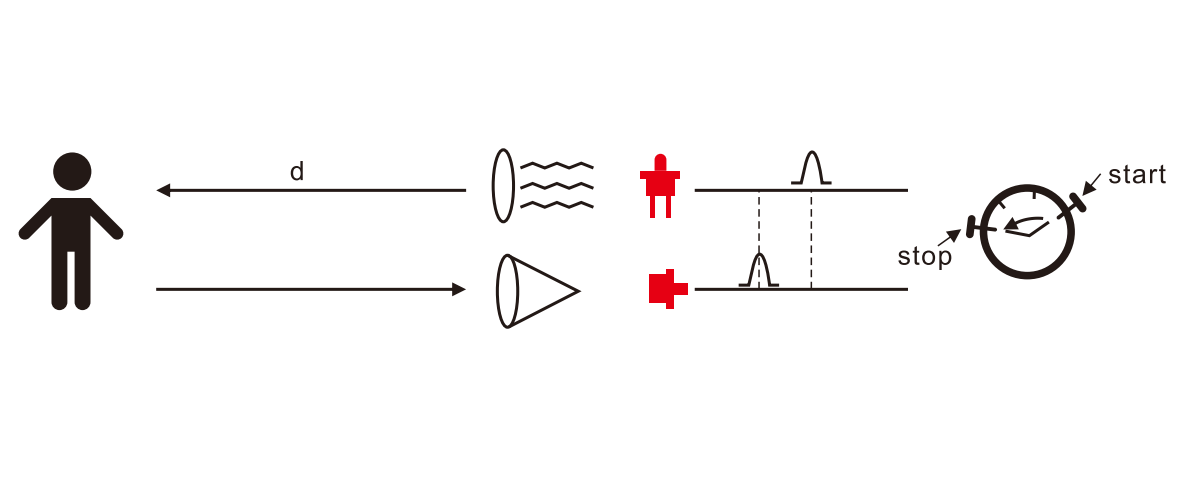
Разница во времени между испусканием и приемом света равна t
c – скорость света, тогда расстояние между радаром и целью равно
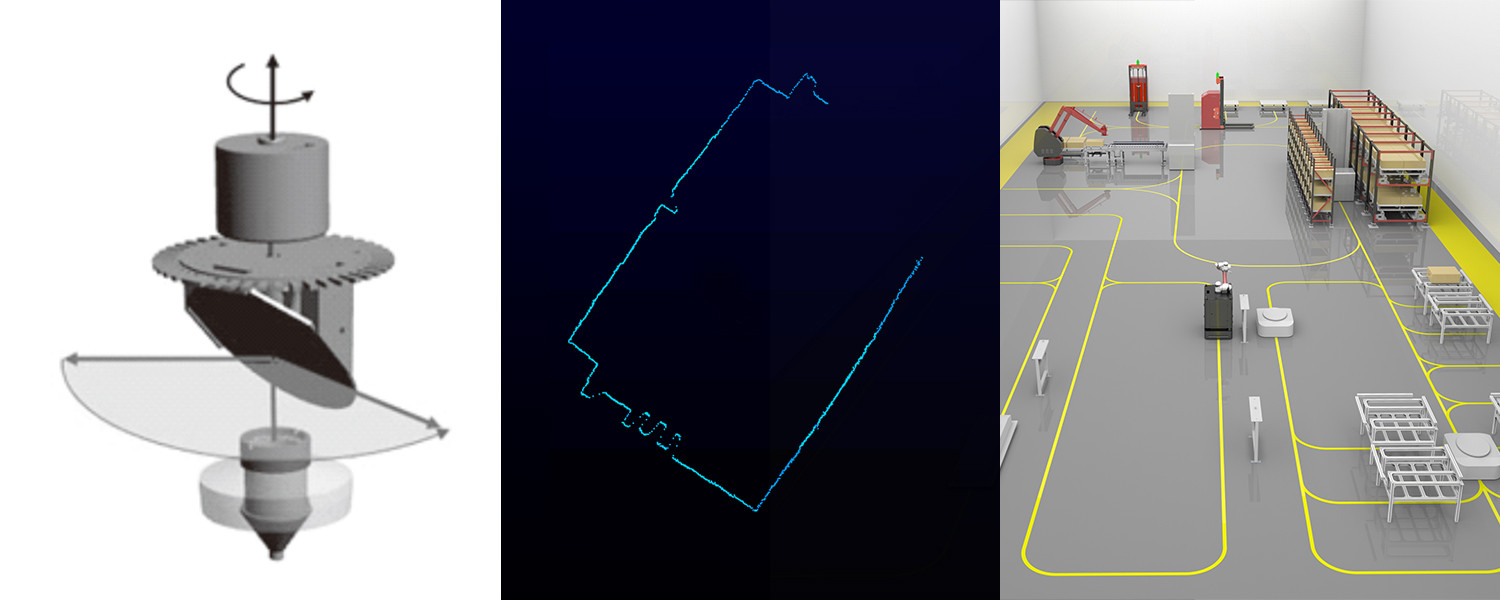
Датчик LiDAR отражает дальномерный лазерный импульс через отражатель. Когда отражатель приводится во вращение двигателем, образуется плоскость сканирования, перпендикулярная оси вращения. Радар излучает импульсный свет в фиксированное время, а двигатель приводит во вращение передающее зеркало, что позволяет формировать двумерные данные облака точек.
Когда в окружающей среде есть прозрачная среда
Сложность :
Если в окружающей среде имеется прозрачная среда (например, чистая вода), можно измерить цель внутри или за прозрачной средой. Поскольку свет преломляется в прозрачной среде, измеряемая цель фактически находится на пути преломленного света, тогда как результат измерения находится на прямом пути света, и измеренное положение цели будет отклоняться. Кроме того, радар также может принимать два отраженных эхо-сигнала: один от отражения фактической поверхности цели внутри или за прозрачной средой, а другой от диффузного отражения поверхности прозрачной среды, которая не является полностью чистой. В настоящее время результат измерения неясен, что может быть поверхностью среды или фактической целью.
Контрмеры:
При фактическом использовании прозрачные среды в окружающей среде, особенно с зеркальными поверхностями, требуют специальной обработки, чтобы избежать нестабильных или ошибочных результатов измерений. Конкретный метод обработки может заключаться в том, чтобы сделать поверхность среды диффузно полупрозрачной, уменьшить прозрачность и отражательную способность или экранировать эти положения при обработке данных измерений.
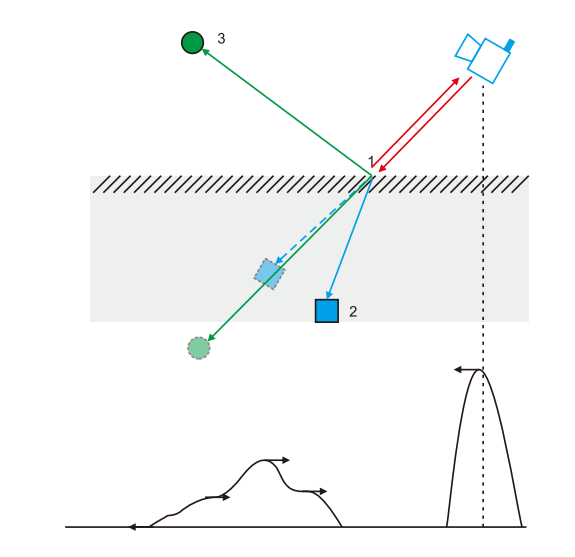
При измерении зеркальных целей

Когда радар измеряет зеркальные цели, будьте внимательны! ! Эффективное измерение может быть достигнуто только тогда, когда поверхность цели перпендикулярна падающему лазеру. Если угол падения лазера не перпендикулярен, его диффузное отражение будет очень низким, что приведет к неэффективным измерениям. Фактический результат измерения — это расстояние до зеркала на пути отражения света от зеркала, как показано на рисунке:
Проекция радара на зеркальную цель создает полное отражение, а свет полного отражения проецируется на цель. Фактическое расстояние, проверенное радаром, — это расстояние до цели в пунктирной рамке.
О фактическом радиусе действия датчика LiDAR
На фактическую дальность действия РЛС по конкретной цели будут влиять следующие факторы:
1. Целевая диффузная отражательная способность:
Целевая диффузная отражательная способность связана не только с материалом, но и с ориентацией поверхности. Чем выше целевая диффузная отражательная способность, тем больше фактическая дальность действия.
2. Область отражения:
Площадь поверхности цели, охваченная лазерным пятном. Чем больше зона покрытия, тем длиннее фактическое расстояние измерения.
3. Загрязнение светопроводящей крышки:
Грязная светопроводящая крышка радара приведет к снижению светопропускания. Чем больше снижается коэффициент пропускания света, тем хуже возможности измерения. Когда коэффициент пропускания света падает до 60%, возможности измерения могут оказаться совершенно неэффективными.
4. Атмосферные условия:
На фактическую измерительную способность радара также влияют атмосферные условия, особенно при работе на открытом воздухе. Чем хуже способность атмосферы распространять свет, тем ниже реальная измерительная способность радара. В экстремальных погодных условиях (например, густой туман) возможности измерения будут совершенно неэффективны.
Горячие продажи продуктов
Расстояние 5 м. Метод, использующий лазерный луч для измерения расстояния и создания подробных карт объектов и окружающей среды.

Расстояние 20 м. Метод, использующий лазерный луч для измерения расстояния и создания подробных карт объектов и окружающей среды.

Диапазон срабатывания 20 м. Метод, использующий лазерный луч для измерения расстояния и создания подробных карт объектов и окружающей среды.

Путем преобразования лазерных сигналов в электрические. определять различные характеристики, расстояние, перемещение или положение.